MC_MoveVelocity
3.10。MC_MoveVelocity
功能块名称:MC_MoveVelocity
该功能块以指定的速度命令永无止境的受控运动。
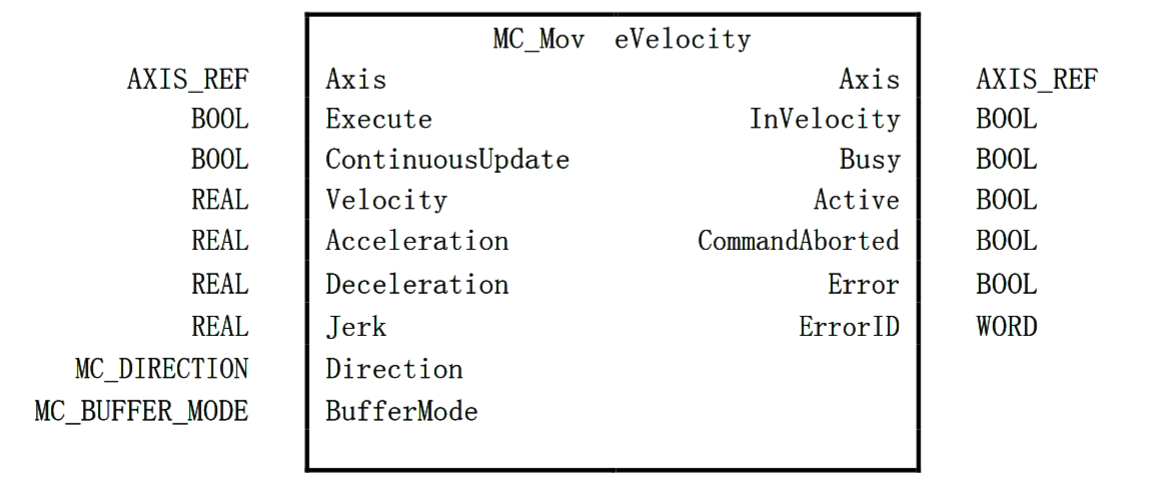
| VAR_IN_OUT | | | | | | ---------- | ---- | ---- | ---- | ---- | |B|轴|AXIS_REF|参照轴|| |VAR_INPUT||||| |B|执行|BOOL|在上升沿开始运动|| |E|ContinuousUpdate| BOOL|参见[2.4.6]25)输入'ContinuousUpdate'|| |B|Velocity|REAL|最大速度的值[u / s]。可以是一个带符号的值。|| |E|加速|REAL|加速度值(增加电机能量)[u / s 2 ]|| |E|减速|REAL|减速度值(电动机能量减小)[u / s 2 ]|| |E|Jerk|REAL|Jerk的价值[u / s 3 ]|| |E|方向|MC_DIRECTION|枚举类型(3个值中的1个:mcPositiveDirection,mcNega-tiveDirection和mcCurrentDirection。注意:最短的方法不适用)|| |E|BufferMode|MC_BUFFER_MODE|定义FB的时间顺序。见2 [.4.2]22)[中止与BufferMode]22)|| |VAR_OUTPUT||||| |B|InVelocity|BOOL|达到指令速度|| |E|Busy|BOOL|FB尚未完成,并且将要输出新的输出值。被撬|| |E|Active|BOOL|表示FB控制轴ECommandAborted BOOL“命令”被另一个CommandAborted|| |B|Error|BOOL|表示功能块内发生了Error|| |E|ErrorID|WORD|Error识别||
笔记: •要停止运动,必须由另一个发布新命令的FB中断该FB •当该块被另一个块中止时,“ InVelocity”信号复位。 •负速度x负方向=正速度 •与MC_MoveSuperimposed结合使用时,只要此FB的贡献,便会设置输出'InVelocity'(MC_MoveVelocity)等于设置的速度等于该FB的命令速度。
下图显示了两个MC_MoveVelocity功能块组合的两个示例:
1.时序图的左侧部分说明了在第一个功能块之后 调用第二个功能块的情况Done。如果First达到命令的速度3000,则输出'First.InVelocity'和信号接下来,第二个FB移至速度2000。在下一个循环中,“ First.InVelocity”被重置,设置了“ First.CommandAborted”。因此,第二个FB的“执行”被复位。并尽快达到“速度” 2000时,将设置“第二速度”。
2。时序图的右侧部分说明了第二移动功能块开始执行的情况而第一FB尚未“ InVelocity”。显示了以下顺序:通过输入'First.Execute' 的GO再次开始第一个运动。而第一FB仍在加速以达到速度3000,第一FB将被中断和中止,因为测试信号将启动第二个FB的运行。现在,第二FB运行,并将速度降低到2000。
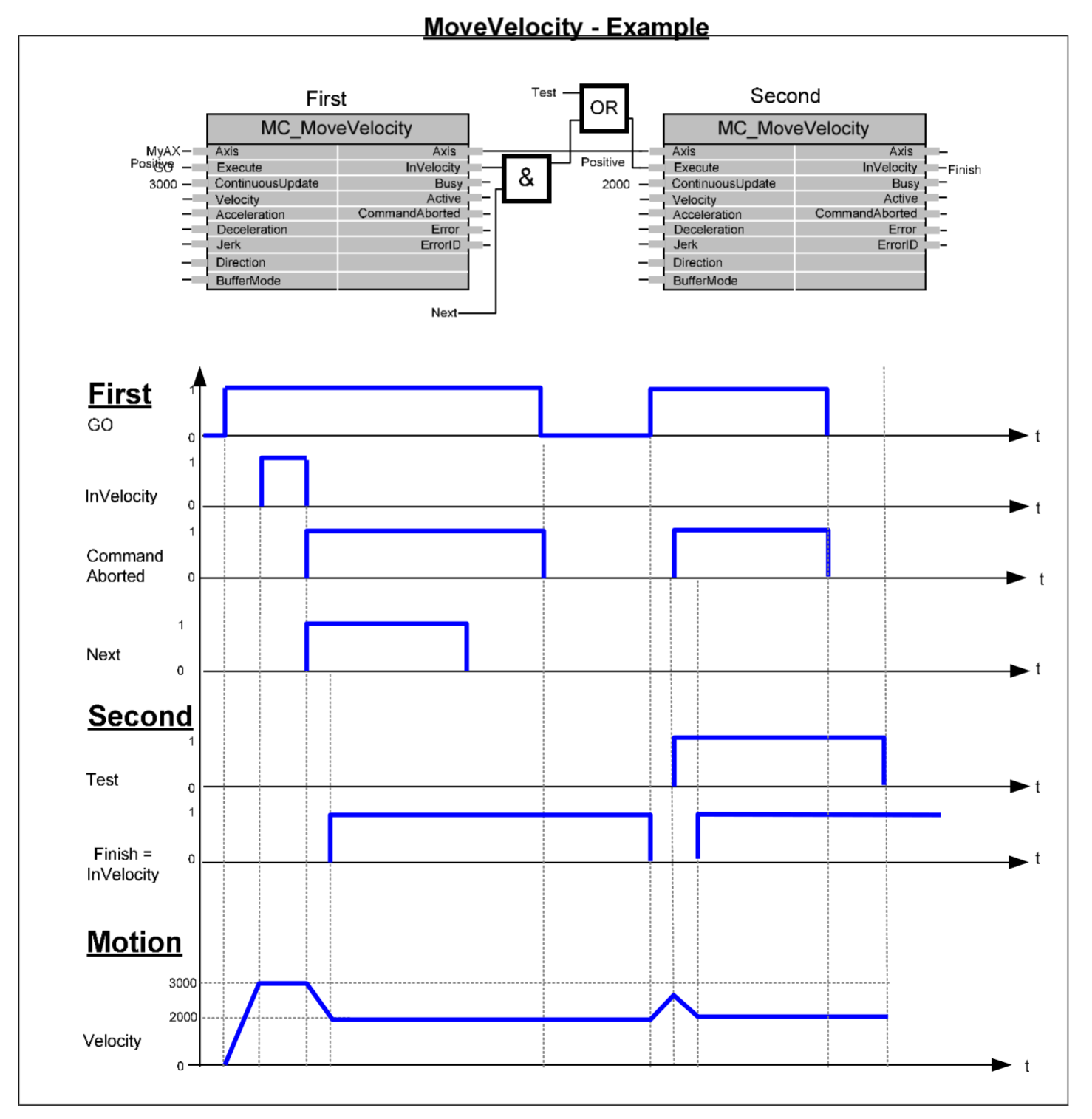
图24:MC_MoveVelocity时序图
注意:第二个FB处于“正在中止”模式(如果处于BufferMode,则在启动下一个FB之前速度将达到3000)。