MC_MoveAbsolute
3.5。MC_MoveAbsolute
功能块名称:MC_MoveAbsolute
该功能块命令受控运动到指定的绝对位置。
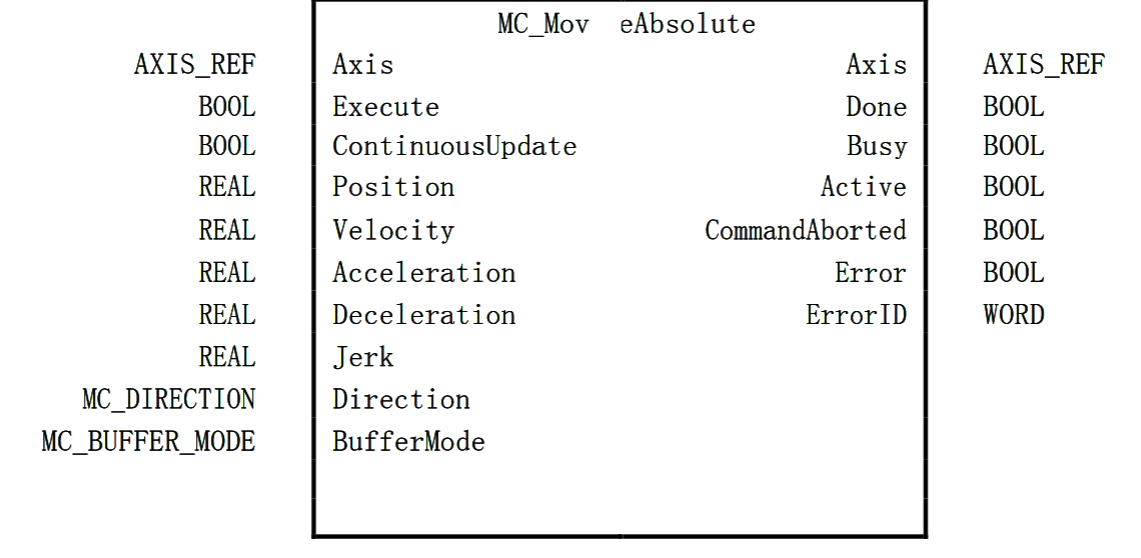
|VAR_IN_OUT | | | | | ---- | ---- | -------- | ------ | |B|轴|AXIS_REF|参照轴 |VAR_INPUT |B|执行|BOOL|在上升沿开始运动| |E|ContinuousUpdate| BOOL|参见[2.4.6]25)输入'ContinuousUpdate'| |B|位置|REAL|指令动作的“位置”(在技术部门中)[u])(负数或正数)| |B|速度|REAL|最大“速度”的值(不一定是达到)[u / s]。| |E|加速|REAL|“加速”的值(始终为正)(增加电机的能量)[u / s 2 ]| |E|减速|REAL|“减速”的值(始终为正)(减小电机的能量)[u / s 2 ]| |E|Jerk|REAL|'Jerk'的值[u / s 3 ]。(总是积极的)| |B|方向|MC_DIRECTION|枚举类型(4个值中的1个:mcPositiveDirection,mcShort-estWay,mcNegativeDirection,mcCurrentDirection)| |E|BufferMode|MC_BUFFER_MODE|定义FB的时间顺序。见[2.4.2]22)“[中止与BufferMode]22)”| |VAR_OUTPUT |B|Done|BOOL|指挥位置终于到达| |E|Busy|BOOL|FB未完成,将要输出新的输出值预期| |E|Active|BOOL|表示FB控制轴ECommandAborted BOOL“命令”被另一个CommandAborted |B|Error|BOOL|表示功能内发生Error块 |E|ErrorID|WORD|Error识别|
笔记: •如果没有其他动作待完成,则此动作以速度零完成 •如果只有一种数学解决方案可以达到“ CommandedPosition”(类似于线性系统),则输入“方向”被忽略 •对于模数轴-有效的绝对位置值在[0,360 [,(不包括360))范围内范围。但是,应用程序可以将MC_MoveAbsolute的“ CommandedPosition”移至对应的-取模范围。 •枚举类型'mcShortestWay'集中于一条轨迹,该轨迹将经过最短的路线。决定哪个方向是基于发出命令的当前位置。
下图显示了两个绝对移动功能块组合的两个示例:
- 时序图的左侧部分说明了在第一个功能块之后调用第二个功能块的情况。如果第一个到达命令的位置6000(且速度为0),则输出“完成”将导致第二个FB移至“位置” 10000。
- 时序图的右侧部分说明了第二移动功能块在以下情况下开始执行的情况:
第一功能块仍在执行。在这种情况下,第一次运动会在测试期间被测试信号中断并中止。第一FB的恒定速度。第二个FB直接移动到位置10000,尽管位置为6000尚未达到。
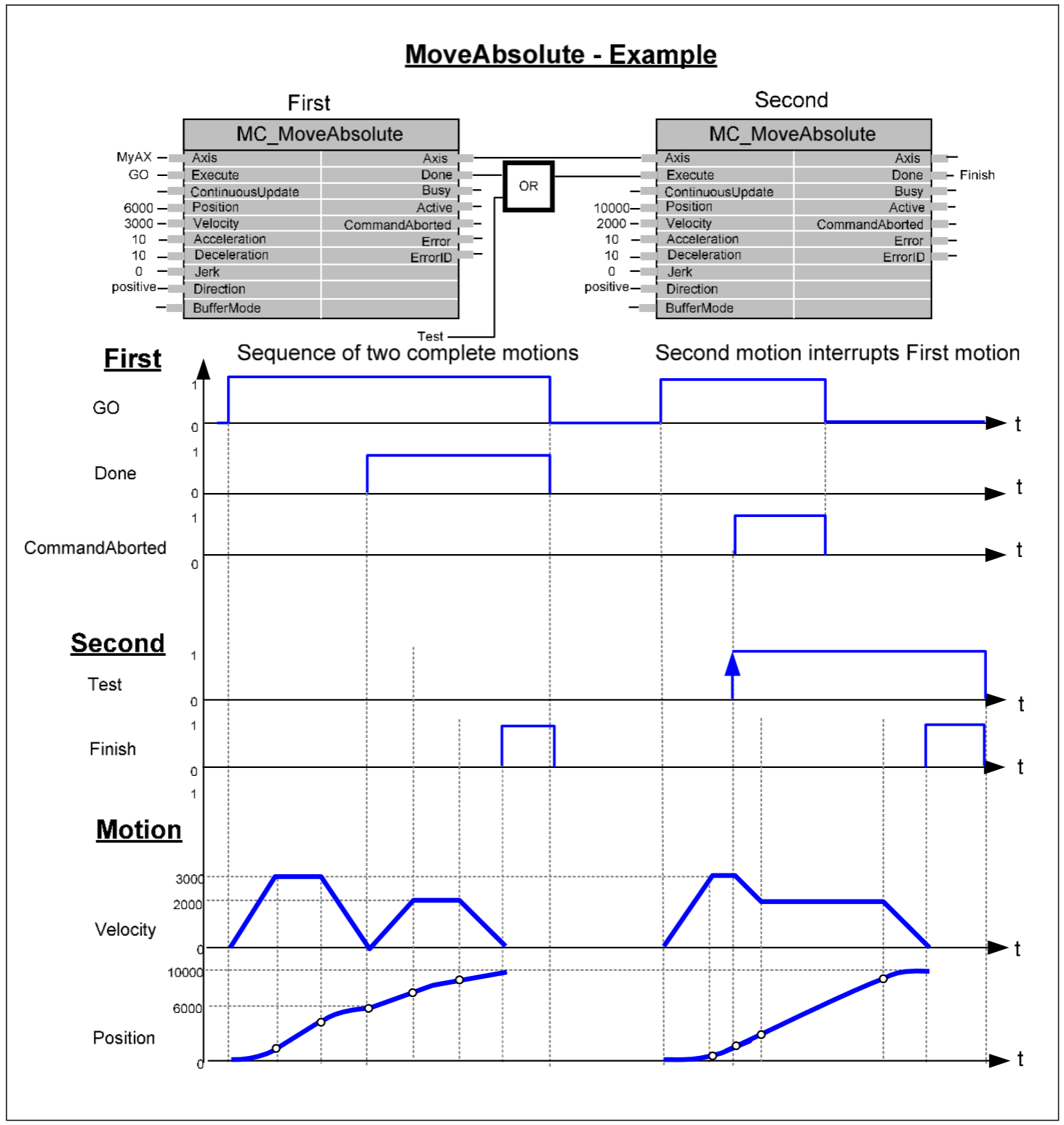 图18:MC_MoveAbsolute的时序图
要注意的是:这些示例基于功能块的两个实例:实例“ First”和“ Second”。
图18:MC_MoveAbsolute的时序图
要注意的是:这些示例基于功能块的两个实例:实例“ First”和“ Second”。