MC_Home
功能块名称:MC_Home
该功能块命令轴执行“搜索原点”序列。此序列的详细信息是取决于制造商,可以通过轴的参数进行设置。“位置”输入用于设置绝对位置-当检测到参考信号时。如果在“停顿”中启动了该功能块,则该功能块将在“停顿”处完成。
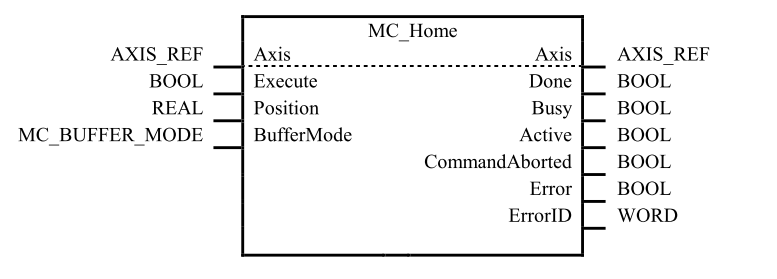
| VAR_IN_OUT | | | | | ---------- | ---- | -------- | ------ | | B | Axis | AXIS_REF | 参照轴 |
| VAR_INPUT | | | |
| --------- | ------------ | ------------- | ------------------------------------------------------------ |
| B | Execute | BOOL | 在上升沿开始运动 |
| B | Position | REAL | 检测到参考信号时的绝对位置[u] |
| E | BufferMode | MC_BufferMode | 定义FB的时间顺序。见2 [.4.2]22)[中止与BufferMode]22) |
| E | HomingMode | UINT | MC_HOMING_PROCEDURES__MCHOMEDIRECT,
MC_HOMING_PROCEDURES__MCHOMELIMITSWITCHPOSITIVE,
MC_HOMING_PROCEDURES__MCHOMELIMITSWITCHNEGATIVE,
MC_HOMING_PROCEDURES__MCHOMEABSOLUTESWITCHPOSITIVE,
MC_HOMING_PROCEDURES__MCHOMEABSOLUTESWITCHNEGATIVE,
MC_HOMING_PROCEDURES__MCHOMEREFERENCEPULSEPOSITIVE,
MC_HOMING_PROCEDURES__MCHOMEREFERENCEPULSENEGATIVE,
MC_HOMING_PROCEDURES__MCHOMEABSOLUTE |
| VAR_OUTPUT | | | | | ---------- | -------------- | ---- | ---------------------------- | | B | Done | BOOL | 参考已知并已成功设置 | | E | Busy | BOOL | FB未完成,预计会有新的输出值 | | E | Active | BOOL | 表示FB控制轴 | | E | CommandAborted | BOOL | “命令”被另一个CommandAborted | | B | Error | BOOL | 表示功能块内发生了Error | | E | ErrorID | WORD | Error识别 |
注意: MC_Home是一个通用FB,它执行系统指定的归位程序,该程序可以由第5部分-归位过程中指定的StepHoming FB。