2.2-3错误处理
2.2 Error处理
通过功能块可以访问驱动/运动控制。这些功能块在内部提供基本Error检查输入数据。确切的实现方式取决于实现。例如,如果MaxVelocity设置为6000,并且将FB的Velocity输入设置为10,000,则系统速度变慢或生成Error。在这种情况下当智能驱动器通过网络与系统耦合时,MaxVelocity参数可能存储在驾驶。FB必须注意它可以处理驱动器内部产生的Error。通过另一种实现,MaxVelocity值可以存储在本地。在这种情况下,FB将在本地生成Error。
2.2.1 集中式与分散式
使用运动控制功能时,集中式和分散式Error处理方法均可行块。集中式Error处理用于简化功能块的编程。Error反应是相同的,发生Error的实例的ent。
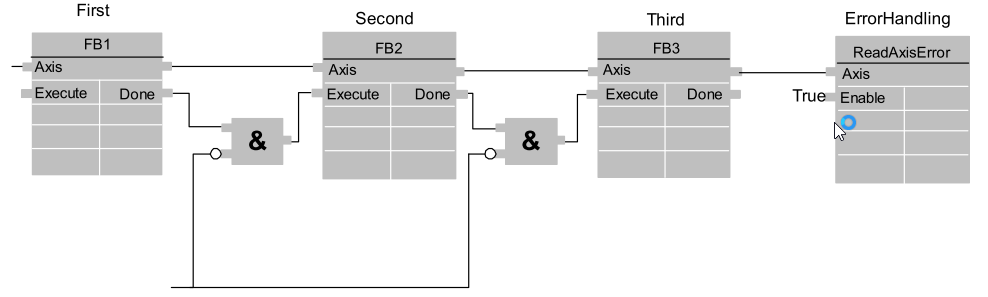
图3:具有集中式Error处理的功能块
分散的Error处理可根据功能块的不同而做出不同的反应。发生了Error。
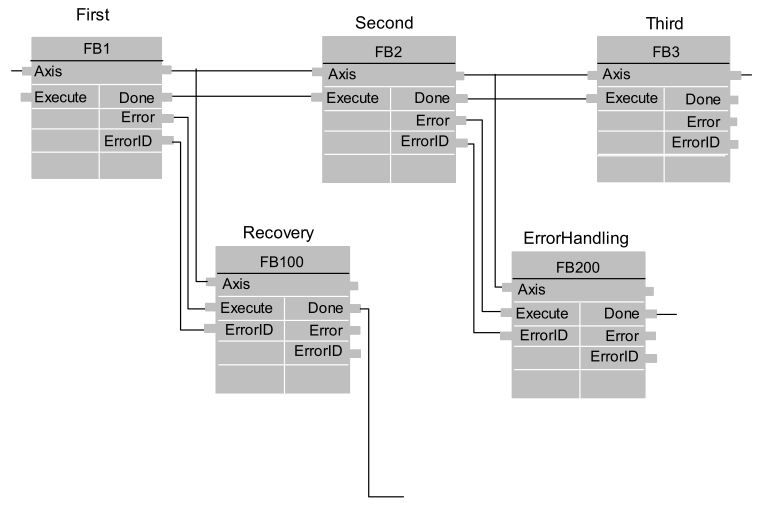
图4:具有分散式Error处理的功能块
2.2.2 缓冲命令
如果适用的轴移至“ ErrorStop”状态,则所有缓冲的命令都将中止。ap-的“Error”输出设置可中止的FB。任何后续命令将被拒绝,并且Error输出为SET(操作不能降低–参见状态图)如果FB有Error(例如由于参数设置Error),则会设置Error输出,并且行为取决于在应用程序上。例如,对于两个FB,第一个FB实例FB1在一个FB上执行任何运动命令。轴。在同一轴上以BufferMode在另一个FB实例FB2上启动新命令。此命令已缓冲并等待直到FB1完成。在第一个实例FB1完成命令之前,请让以下情况之一发生:
- 轴进入“ ErrorStop”状态(例如,由于跟随Error或过热)。FB1将输出设置为“Error”。FB2(以及正在该轴上等待执行缓冲命令的任何其他FB实例)设置其“Error”输出并显示输出“ ErrorID”,表明它无法执行其作业,因为轴处于未激活状态允许它。清除所有缓冲的命令。通过MC_Reset复位轴Error后,可以再次进行命令。
- FB1设置其“Error”输出(例如,由于无效的参数设置)。FB2变为活动状态并执行给定命令后,应用程序应处理Error情况。
2.2.3 "Enable"输入的时序示例
示例1:在图片的左侧,显示了正常操作。操作过程中右侧出现Error发生。此Error将强制重置“有效”输出。输出“Busy”保持高电平。重置Error后,可能会在一段时间后恢复正常的操作过程。
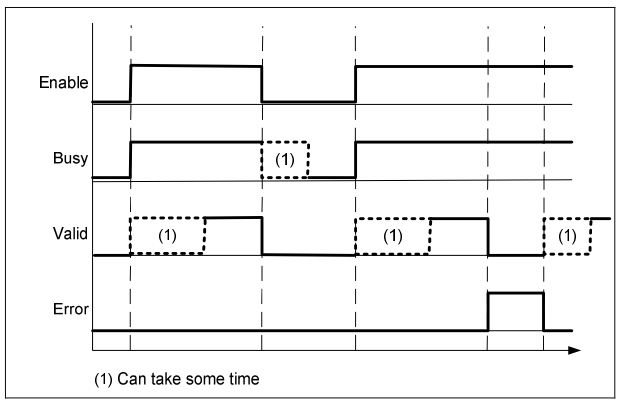
图5:使用"Enable"输入进行Error处理的示例 第二个示例在右侧显示无法自动清除的Error。输出“Busy”和设置Error后,将重置“有效”。FB需要在"Enable"输入上有一个上升沿才能继续。
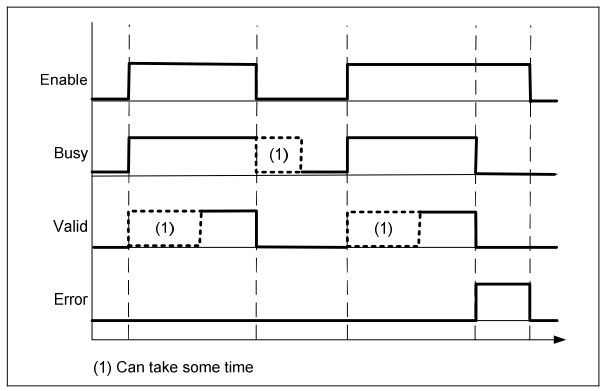
图6:带有"Enable"输入的Error行为的第二个示例
2.3 定义
在本文档中,使用了以下电平的值:命令/设置/实际:
•指令值–是基于功能块输入的值,可用作(其中之一)输入到概要文件生成器。
•设定值–处于“较低”水平,靠近执行器。它是最新的值(由配置文件生成器生成),它是即将发送到伺服回路(例如执行器),例如执行器将使用的下一个值。
•实际值–反馈系统中系统中可用的最新值