MC_Stop
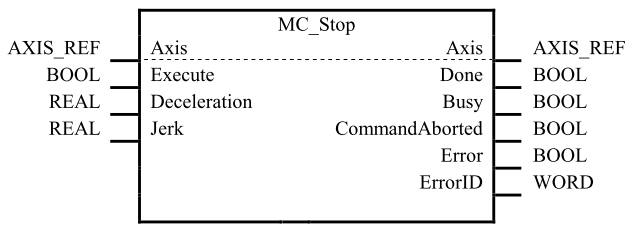
3.3 MC_Stop
功能块名称:MC_Stop 该功能块命令受控的运动停止并将轴转换为“停止”状态。它中止任何正在进行的功能块执行。当轴处于“停止”状态时,没有其他FB可以在轴上执行任何运动。同一根轴。轴达到“速度”零后,“完成”输出立即设置为TRUE。轴重只要“执行”仍为TRUE或尚未达到“速度”零,市电就处于“停止”状态。立刻设置为“完成”,设置为“执行”为假,轴进入状态“静止”。
|VAR_IN_OUT | | | |
| ---- | ---- | -------- | ------ |
| B | 轴 | AXIS_REF | 轴参考 |
|VAR_INPUT|
| B | Execute | BOOL | 在上升沿开始动作 |
| E | Deceleration | REAL | “减速度”的值[u / s 2 ] |
| E | Jerk | REAL | “Jerk”的值[u / s 3 ] |
|VAR_OUTPUT|
| B | Done | BOOL | 达到零速度 |
| E | Busy | BOOL | FB未完成,预计会有新的输出值 |
| E | CommandAborted | BOOL | 关闭电源会中止“命令”(中止) |
| B | Error | BOOL | 表示功能块内发生了Error |
| E | ErrorID | WORD | Error识别 |
注意:
- 该功能块主要用于紧急停止功能或异常情况
- 只要“ Execute”(执行)为高电平,轴就保持在“ Stopping”(停止)状态,并且可能不执行任何其他运动命令。
- 如果“ Deceleration” = 0,则功能块的行为特定于实现
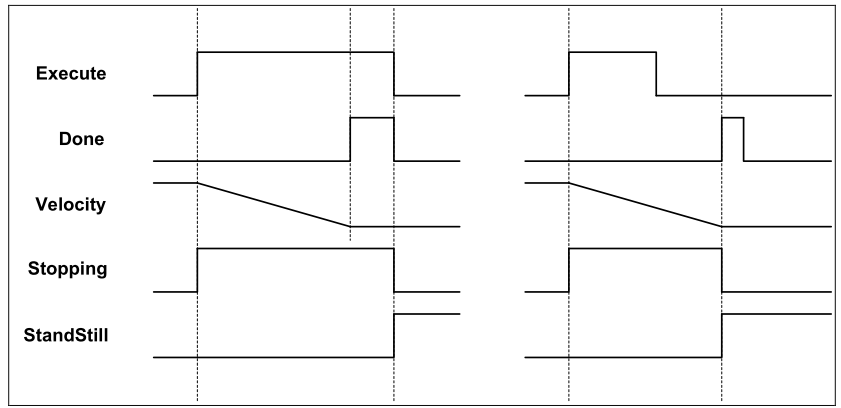 图15:MC_Stop时序图
图15:MC_Stop时序图
下面的示例显示了与MC_MoveVelocity结合使用的行为。
a)FB MC_Stop使旋转轴下降。
b)只要MC_Stop参数'Execute'= TRUE,轴就拒绝运动命令。FB MC_MoveVelocity报告一个Error,指示繁Busy的MC_Stop命令。
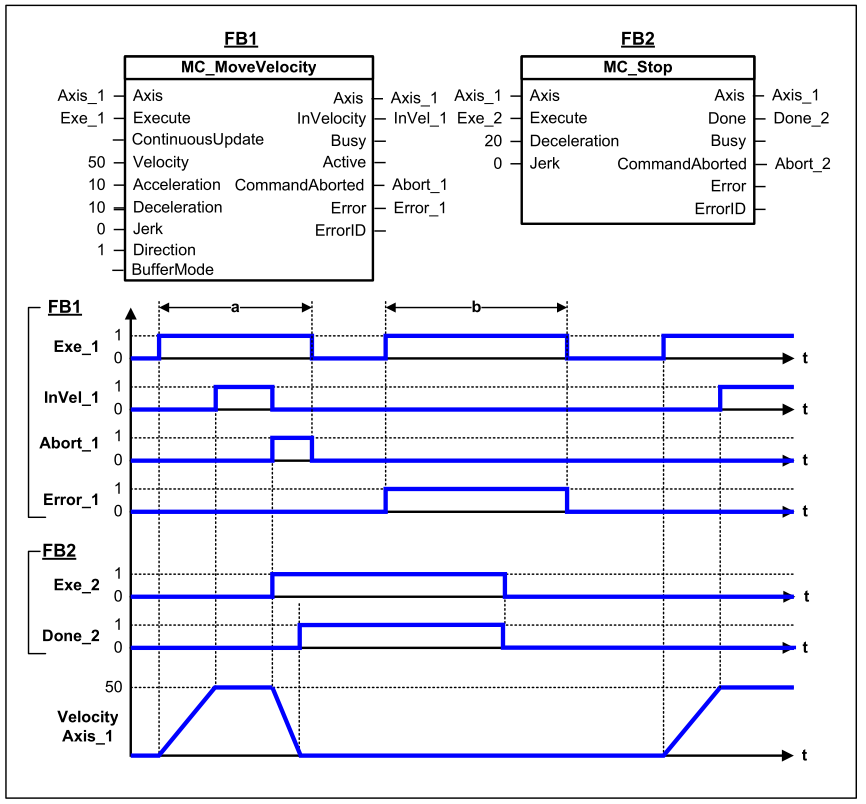
图16:结合使用MC_MoveVelocity的MC_Stop行为