运动控制功能块技术规范part1
运动控制功能块技术规范
版本2.0,已发布
zotero://select/library/items/7DC64MZR
免责声明: 本文档是按“原样”提供的,可能会受到未来的补充,修改或更正。PLCOPEN在此免除所有担保或任何形式的明示或暗示的条件,包括但不限于所有权的保证或条件,不侵权,可贸易性或适用性本文档的特殊目的。在任何情况下PLCOPEN均不负责因任何缺陷,Error或疏忽导致的任何损失或损坏本文档,或任何人对本文档的使用或依赖。
版权所有©2009 – 2011 by PLCopen。
目录
[toc]
PLCopen运动控制任务组已制定了以下规范。
该规范由运动控制任务组的以下成员编写:
变更状态清单:
| 版本 | 日期 | 变更注释 |
|---|---|---|
| V 0.1 | 2008年9月26日 | 第一份工作草案。合并第1部分和第2部分以及更正。 |
| V 0.2 | 2010年1月6日 | 作为2009年11月9日至10日在法兰克福举行的会议的结果 |
| V 0.3 | 2010年2月4日 | 作为2010年2月3日至4日在Bad Pyrmont举行的会议的结果。讨论未决问题。 |
| V 0.4 | 2010年4月1日 | 作为2010年3月17日至18日在法兰克福举行的会议的结果。包括1.99版的反馈意见。发布为V1.99之前进行编辑性更正的基础。通过docx转换清除了文档文件Error。 |
| V 1.99 | 2010年5月21日 | 发布为征求意见稿 |
| V 1.99A | 2010年12月14日 | 作为几次会议反馈的结果 |
| V 1.99B | 2011年1月31日 | 作为反馈和1月网络会议的结果 |
| V 1.99C | 2011年2月27日 | 作为2月的网络会议反馈结果 |
| V 1.99D | 2011年3月16日 | 作为三月份网络会议的结果。发行前的最新版本 |
| V 2.0 | 2011年3月17日 | 正式发布 |
1. 总则
运动控制市场显示出各种不兼容的系统和解决方案。在不同的企业使用系统,这种不兼容会给最终用户带来可观的成本,学习混乱,工程变得困难,市场增长过程放慢。 标准化肯定会减少这些负面因素。标准化不仅意味着编程语言,本身进行衡量(因为使用全球IEC 61131-3标准实现了标准化),但也进行了标准化面向不同运动控制解决方案的界面。这样,这些运动控制解决方案的编程较少依赖硬件。应用软件的可重用性得到提高,并且培训涉及的成本和支持减少。 用户要求PLCopen帮助解决此问题,从而启动了运动控制任务组。这个工作组通过标准化运动控制功能块定义了程序员的界面。
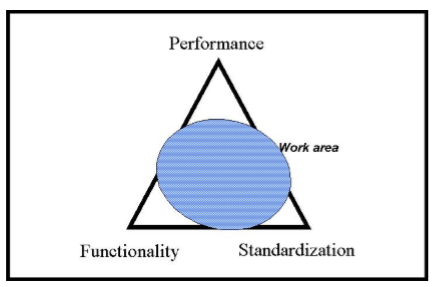 图1:带有用户选项的三角形
有关此活动的位置,请检查图1。此三角形的拐角处具有以下用户选项:
图1:带有用户选项的三角形
有关此活动的位置,请检查图1。此三角形的拐角处具有以下用户选项:
- 性能
- 功能性
- 标准化。 在实践中,用户编写自己的程序与具有专用功能的硬件非常紧密地结合在一起,以便获得根据他们的环境确定最高的性能。这限制了用户在选择针对硬件和控制软件的可重用性,并增加了培训投入。
第二个用户选项可提供非常广泛的软件功能。这对用户,但很少会带来高性能。培训费用也增加了。
第三个角落是标准化,主要关注来自不同供应商的不同系统之间的可重用性,包括集成,分布式和网络化的系统,以及减少培训投资。由于一般此定义的特点是,在不同体系结构上的性能可能不如硬编码最佳。由于此,不应期望标准化能够提供最大的性能,但是可以紧密接近最大的功能,表示三角形的底部很短。 第一个规范发布为独立的运动控制功能块库。它包括运动单轴和多轴功能,多个管理任务以及状态图。本规范为用户提供了独立于底层体系结构的标准命令集和结构。此结构可用于许多平台和体系结构。通过这种方式,可以决定将采用哪种架构在开发周期的后期使用。机器制造商的优势尤其是降低了制造成本支持不同的平台,并以更独立的方式自由开发应用程序软件,而无需限制了机器的生产率。除了这些好处之外,系统维护更容易,而且教育周期较短。这是向前迈出的重要一步,越来越为用户和供应商所接受。随着第1部分的发布,可以理解,还需要其他功能。
第1部分提供了一套基础相互关联的规范:
- 第1部分-运动控制的PLCopen功能块
- 第2部分-PLCopen运动控制-扩展,在新版本2.0中与第1部分合并
- 第3部分-PLCopen运动控制-用户指南
- 第4部分-PLCopen运动控制–协调运动
- 第5部分-PLCopen运动控制-归位扩展
- 第6部分-PLCopen运动控制–流体动力扩展 随着基础文档的发布,第1部分–运动控制2.0版的PLCopen功能块,第2部分– PLCopen运动控制扩展已集成到基本文档中。
《PLCopen运动控制用户指南》第3部分是对用于运动控制的PLCopen功能块的补充,不应视为独立文件.
1.1 目标
运动控制功能块适用于IEC 61131-3语言,考虑以下因素:
- 简单-易于使用,适用于应用程序构建器以及安装和维护
- 效率-功能块的数量,旨在提高设计(和理解)的效率
- 一致性-符合IEC 61131-3标准
- 普遍性-硬件独立
- 灵Active-将来的扩展/应用范围
- 完整性-不是强制性的,但足够
1.1.1 语言环境目标
•根据IEC 61131-3,着重定义功能块接口和行为以及数据类型规范。 •这些功能块和数据类型可以在所有IEC 61131-3语言中使用。 •本文档中的示例以文本和图形IEC 61131-3语言提供了翔实的信息。 •功能块的内容可以用任何编程语言(例如IEC 61131-3 ST,C)或即使是固件或硬件。因此,不应期望内容可以跨平台移植。 •使用PLCopen交换简化了由这些功能块和数据类型组成的可重用应用程序标准。 •该规范应被视为没有硬件依赖性的开放框架。它提供了开放性在完全集成,集中式或分布式系统等不同平台上实施。实际实现功能块本身的说明不在本标准范围之内。
1.1.2 一组功能块的定义
一个基本问题涉及标准化功能块的粒度或模块化。极端是其中之一每个轴的功能块与命令电平的功能。可以轻松实现上述目标通过功能块的模块化设计。模块化创造了更高电平的可扩展性,灵Active和可重构性可配置性。然后可以从中创建大型块(派生功能块),例如整个轴,以用于易于构建和浏览应用程序。如果可行,可以将此处指定的功能块实现为功能(例如MC_ReadParameter)。
1.1.3 定义功能块概述
下表概述了已定义的功能块,分为管理(非驾驶)功能和运动相关的集合。
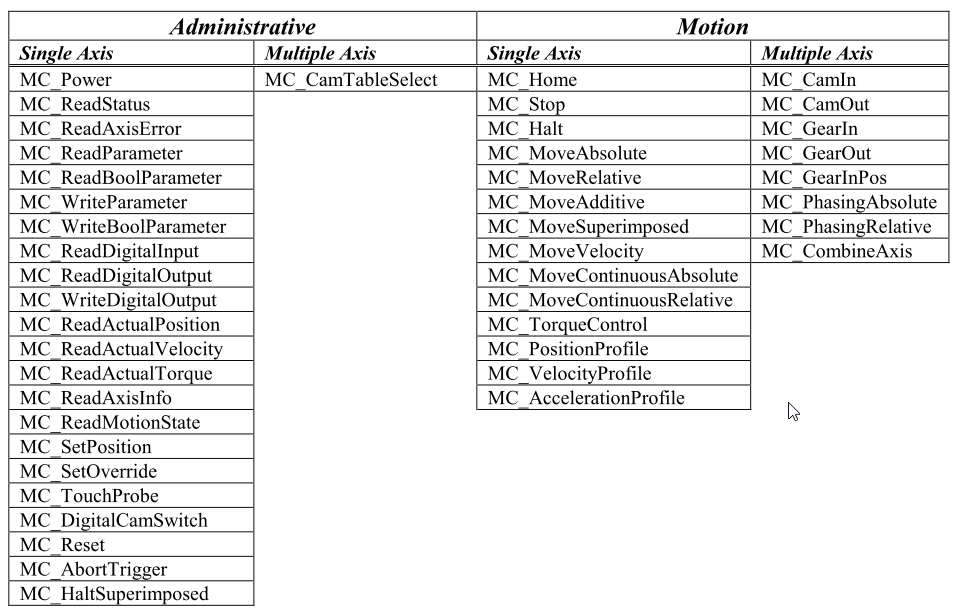 表1:定义的功能块概述
表1:定义的功能块概述
1.1.4 合规性和可移植性
这项工作的目的是使作用在轴上的运动控制功能块的可移植性达到一定水平,并且就用户界面,输入/输出变量,使用的参数和单位。 在一个应用程序中合并来自不同供应商的多个MC库的可能性尚待解决由系统集成商或最终用户解决。 声称符合此PLCopen规范的实现应提供一组(表示一个或多个)至少具有基本输入和输出变量的运动控制功能块,在定义中标记为“ ** B** ”本文档中功能块定义中的表格。 对于更高电平的系统和将来的扩展,扩展输入和输出变量的任何子集在命令中标记为“ E ”这些表可以实现。 供应商特定的添加标记为“ V ”。 有关合规性和PLCopen运动控制徽标的用法的更多特定信息,请参阅附录B。 -基本的输入/输出变量是强制性的在表中标有|WORD|母“ B ” -扩展的输入/输出变量是可选的在表中标有|WORD|母“ E ” -供应商特定的添加在供应商的合规性文档中以“ V ” 标记允许任何供应商将“供应商特定”参数添加到本文档中指定的任何功能块中。 注意: 根据IEC 61131-3规范,输入变量可以不连接,也可以不由用户设置参数。在这种情况下,功能块将使用上一次调用功能块实例的值,或者在第一次调用的情况下,将使用初始值。每个功能块输入都有一个定义的初始值,通常为0。功能块和参数(例如,速度,加速度,距离等) 中列出的数据类型REAL可能是交换为SINT,INT,DINT或LREAL,只要它是一致的,就不会被视为不符合此标准用于整个功能块和参数。 只要保留基本数据类型,实现就可以扩展数据类型。例如:WORD可能是更改为DWORD,但未更改为REAL。 规范的新版本中不再指定的所有FB和输入都可以保存在供应商的系统中。保持兼容性的方法,避免现有FB中发生不兼容的更改。
1.1.5 名称的长度和缩短名称的方法
有些系统仅支持名称中有限数量的有效|WORD|符。对于这些规则较短这里提供名称。尽管必须在认证中提及这些名称,但仍被视为符合这些名称文件。 缩短名称的规则列表:
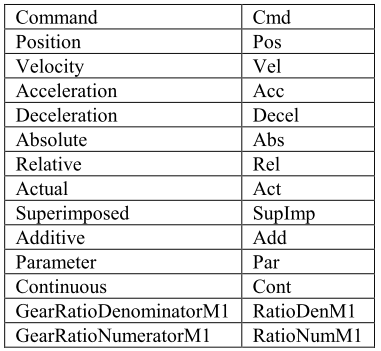
产生的合规名称例如:
| CommandAborted | CmdAborted |
|---|---|
| MC_MoveContinuousRelative | MC_MoveContRel |
| MC_ReadParameter | MC_ReadPar |
1.1.6 历史
第一部分的首次正式发布是在2001年11月。从那时起,双方都收到了反馈。用户和实施者。2004年,决定发行第1部分的新版本1.1版,其中包括由于将反馈包含在规范中而导致的更改。此更新于2005年4月发布。 2005年9月,发布了第2部分-扩展的第一个正式版本。 在此日期之后,两个部分的勘误和附录均已维护。 该提案在2008年被接受将第1部分和第2部分合并为一个新的第1部分,以您现在正在查看的文档2.0版发布。 基本上,两组功能块已经合并。 此外,还进行了几项总体更改。这些更改包括(但不限于):
•简化状态图的表示,并删除转换命令
•新输入“ ContinuousUpdate”扩展了相关运动相关功能块的行为
•采用的描述导致输出“活动”的行为发生变化
•在某些FB中删除了中止模式
•mcAborting枚举的变化
•将MC_Phasing和MC_MoveContinuous FB分为相对和绝对版本
•新功能块MC_ReadMotionState,MC_ReadAxisInfo,MC_CombineAxes和MC_HaltSuperimposed
•Camming中的描述
•MC_CamTableSelect的功能通过输入“ ExecutionMode”扩展。'Peri-的描述odic'定义更精确。
•通过输入“ MasterStartDistance”和“ MasterSyncPosition”扩展了MC_CamIn的功能。
•MC_CamIn,MC_GearIn,MC_GearInPos中的新输入“ MasterValueSource”和相应的数据类型,MC_ReadMotionState和MC_CombineAxes
•MC_SetPosition的输入“ Mode”现在称为“ Relative”(与第4部分一致)
•所有功能块,枚举元素,数据类型,结构,输入和输出的统一命名约定PLCopen运动控制规格。
•在相应的SET之后,“ InVelocity”,“ InGear”,“ InTorque”和“ InSync”输出的行为发生了变化达到价值
•未添加到功能块中的功能块MC_ReadAxisInfo,MC_PhasingRelative和MC_PhasingAbsolute在状态图中列出
•输入“轴”,“主”和“从”的描述已更改
•输出“Busy碌”,“Error”和“ErrorID”的描述已更改
**
**
2.
[[2.1状态图]] [[2.2-3错误处理]] [[2.4FB接口]] [[2.5。示例1:同一功能块实例控制轴的不同运动]] [[2.6。示例2:不同的功能块实例控制轴的运动]]
3. 单轴功能块
3.1 [[MC_Power]]
3.2 [[PUBLIC/plcopen/MC_Home]]
**3.4。[[MC_Halt]]
3.3 [[MC_Stop]]
3.5 [[MC_MoveAbsolute]]
3.6 [[MC_MoveRelative]]
3.7。[[MC_MoveAdditive]]
3.8。[[MC_MoveSuperimposed]]
**3.9。[[MC_HaltSuperimposed]]
3.10 [[MC_MoveVelocity]]
**3.11。[[MC_MoveContinuousAbsolute]]
3.12。[[MC_MoveContinuousRelative]]
**3.13。[[MC_TorqueControl]]
**3.14。[[MC_PositionProfile]]
**3.15。[[MC_VelocityProfile]]
**3.16。[[MC_AccelerationProfile]]
3.17 [[MC_SetPosition]]
**3.18。[[MC_SetOverride]]
**3.19。[[MC_ReadParameter和MC_ReadBoolParameter]]
**3.20。[[MC_WriteParameter和MC_WriteBoolParameter]]
**3.21。[[MC_ReadDigitalInput]]
**3.22。[[MC_ReadDigitalOutput]]
**3.23。[[MC_WriteDigitalOutput]]
**3.24。[[MC_ReadActualPosition]]
**3.25。[[MC_ReadActualVelocity]]
**3.26。[[MC_ReadActualTorque]]
**3.27。[[MC_ReadStatus]]
**3.28。[[MC_ReadMotionState]]
**3.29。[[MC_ReadAxisInfo]]
**3.30。[[MC_ReadAxisError]]
**3.31。[[MC_Reset]]
**3.32。[[MC_DigitalCamSwitch]]
**3.33。[[MC_TouchProbe]]
**3.34。[[MC_AbortTrigger]]
**4。****多轴功能块
** 使用多轴功能块时,两个或多个轴之间存在同步关系。同步化可能与时间或位置有关。通常这种关系是在主轴和一个或多个从轴之间。高手轴可以是虚拟轴。从状态图的角度来看,可以查看与凸轮和齿轮相关的多轴功能块作为主轴处于一种状态(例如:MC_MoveContinuous),而从轴处于特定的同步状态,称为“同步运动”(请参见状态图,第2 [.1] 13)章[)]13)。
4.1。对Camming的评论
** 机械凸轮是机械联动装置中的旋转或滑动件,特别用于转换旋转运动变成直线运动,反之亦然。它通常是旋转轮(例如偏心轮)或轴(例如圆柱体)的一部分形状不规则)在圆形路径上的一个或多个点处撞击杠杆。凸轮可以是简单的齿,例如用于将电源脉冲传递到蒸汽锤,例如偏心盘或其他会产生冲击的形状。从动件中的往复运动(来回)平稳,该从动件是与凸轮接触的杠杆。这样一来,凸轮就可以在位置/位置模式下在主机和一个或多个从机之间建立链接(请参见此处的图-下)。使用电机和驱动器,可以创建相同的位置/位置关系,但在这种情况下,可以通过所谓的凸轮表列出职位。因此,关系被转换为软件和控制。位置位置奴隶主** 图42:CAM轮廓图基本上,可以区分模和线性(或有限)主轴的两种凸轮类型:•周期性模式 -连续重复执行凸轮配置文件,即使CAM配置文件没有匹配模。这意味着对于模数为360的模数轴,CAM轮廓为固定90度,它将以模数执行4次。在反向模式下,轮廓以相反的方式执行。• 非周期性模式**– CAM配置文件仅运行一次。如果主位置不在“凸轮”配置文件之外,则从动轴保持同步运动并保持最后位置。在反向模式下,不执行CAM配置文件到达“ EndOfProfile”位置后被剪切。上面的90度示例将仅运行一次。可以使用几个组合的凸轮表来完成凸轮运动,这些凸轮表依次执行,例如加速,生产循环和加速。在执行过程中,不同的凸轮曲线之间可能存在间隙(等待触发)。但是,一个可以采用BufferMode,也可以使用输出“ EndOfProfile”启动下一个配置文件。CAM表 用一张桌子(二维–一起描述主从位置)或两张桌子-进行凸轮运动主从位置分开。该表应严格单调上升或下降,既要反向又要反向与主人一起前进。在CAM运行时可以更改表,而在CAM运行时可以更改表中的元素。运行。CAM表(主,从)的生成和填充是由特定于供应商的外部工具执行的。FB MC_CamIn与表的耦合也是特定于供应商的。
第89章一更
第89/141页价值展示类型 主动轴和从动轴可能具有不同的显示方式:•绝对值•相对于起始位置•相对步骤(与上一个位置不同)•等距或非等距值。•多项式格式。在这种情况下,凸轮在从动表中有完整描述。主表为零。** CAM功能块**凸轮功能具有不同功能块的优点是程序更加透明。裁切流程和更好的执行性能。
第90页
第90/141页
4.2。MC_CamTableSelect
第91章一更
第91/141页
**4.3。[[MC_CamIn]]
**4.4。[[MC_CamOut]]
**4.5。[[MC_GearIn]]
**4.6。[[MC_GearOut]]
**4.7。****[[MC_GearInPos]]
**4.8。[[MC_PhasingAbsolute]]
**4.9。[[MC_PhasingRelative]]
**4.10。[[MC_CombineAxes]]
**5,***MC FB的应用–“中止”与“融合”的钻井示例
FFF倒转图52:简单钻孔单元示例这个简单的钻孔示例显示了两种模式之间的差异。为了钻孔,必须执行以下步骤:步骤1: 初始化,例如在开机时。第2步:向前移动到钻孔位置,然后开始进行钻孔车削。这样,它将在到达位置,然后检查两个动作是否均已完成。 步骤3:钻孔。第4步:在钻完孔之后,我们必须等待阶梯链序列完成驻留以释放任何脱模孔。bris,可能已经卡在洞中了。步骤5: 将钻头移回到起始位置并关闭主轴。结合完成后退然后停止主轴,我们发出信号以重新启动步进链。FFWD前轮驱动住倒转速度位置ŤŤ 速度位置ŤŤFFWD前轮驱动住倒转图53:钻孔时序图。左侧不融合,右侧不融合*
第110页
第110/141页
5.1。功能框图解决方案
可以使用FBD中的相同程序描述这两个示例。区别在于在“ BufferMode”的输入第二个FB MC_MoveRelative。本示例中显示的模式是“正在中止”或“低混合”。图54:具有功能框图的解决方案
*5.2。具有顺序功能图的解决方案
**这是使用顺序功能图指定顺序步骤的经典方法。SFC执行上面示例中给出的时序图。图55:用于SFC中钻探示例的直进式步进过渡链 Done初始化吨绝对移动相对移动绝对移动DoneDoneDoneDoneINT
第111页
第111/141页
附录A.不同缓冲区模式的示例
示例1:绝对运动后2的标准行为*图56:在同一轴上具有两个MC_MoveAbsolute的基本示例** 图57:上面示例的时序图,FB1和FB2之间没有干扰(“中止”模式)**
第112章
第112/141页示例2:“正在中止”运动图58:上面示例的时序图,其中FB2中断FB1(“中止”模式)
第113页
第113/141页示例3:“缓冲”运动图59:上面“缓冲”模式下的示例时序图(停止到速度0并在该点无延迟地启动FB2)
第114章一更
第114/141页示例4:“ BlendingLow”运动图60:上面示例中的模式'BlendingLow'的时序图 (使用从FB1的最终位置到FB2的最终位置的最低速度(=速度2))通过混合(以及其他FB同时在同一轴上工作(如MC_MoveAdditive)),系统具有在将位置分配给相关轴之前,先合并在轴上工作的不同值。
第115章一更
第115/141页示例5:“ BlendingPrevious”动作图61:上面示例中的模式“ Merging1”的时序图(在最终位置FB1使用速度FB1)
第116页
第116/141页示例6:“ BlendingNext”动作 开始_1Busy_1完成_1CA_1速度位置开始_2Busy_2完成_2Active_1CA_2活跃_220001000开始_3Busy_3完成_3CA_3Active_3图62:上面示例中的模式为“ BlendingNext”运动的时序图在MC_MoveVelocity之后有第二个FB时,所有混合模式都应像先前的混合一样工作,否则会产生Error。
117章
第117/141页示例7:“ BlendingHigh”运动图63:上面示例中的模式“ BlendingHigh”运动的时序图
第118页
第118/141页
附录B.合规程序和合规列表
本附录中列出了运动控制供应商对符合性声明的要求功能块。符合性声明包括两个主要组:支持的数据类型和支持的功能块,以及适用的输入和输出。供应商必须填写使用过的表格数据类型和功能块,根据其产品,致力于支持该规范。将这些表格提交给PLCopen,并在获得PLCopen的批准后,该列表将在PLCopen网站上发布-网站,www.plcopen.org 以及简短格式概述,如[附录B]120) 2中所支持的数据类型和[附录B 3]121) 功能块概述如下。除此批准外,还授予供应商PLCopen运动控制徽标的访问和使用权,如下所述:在描述[附录B 4]141) :[PLCopen运动控制徽标及其用法]140)..资料类型 功能块和参数(例如,速度,加速度,距离等)中列出的数据类型REAL可能是交换为SINT,INT,DINT或LREAL,只要它们符合以下条件,就不会被视为不符合本标准:整个功能块和参数的持续性。只要保留基本数据类型,实现就可以扩展数据类型。例如:WORD可能是更改为DWORD,但未更改为REAL。** 功能块以及输入和输出声称符合此PLCopen规范的实现应提供一组功能块,用于运动控制,意味着一个或多个功能块,至少带有基本** 输入和输出变量,标记为“ B ”在表中。必须支持这些输入和输出以使其合规。对于更高电平的系统和将来的扩展,扩展 输入和输出变量的任何子集在命令中标记为“ E ”这些表可以实现。供应商特定的添加标记有“ V ”,并且可以在供应商文档中列出。-基本的输入/输出变量是强制性的在表中标有|WORD|母“ B ”-扩展的 输入/输出变量是可选的在表中标有|WORD|母“ E ”-供应商特定的添加在供应商的合规性文档中以“ V ”标记所有供应商特定的项目都不会在PLCopen网站的比较表中列出,而是在详细的清单中列出。dor特定列表,该列表也已发布。所有FB的所有特定于供应商的输入和输出必须在供应商的认证列表中列出。有了这个,认证-供应商的阳离子清单描述了相关FB的所有I / O,包括特定于供应商的扩展,因此显示供应商使用的完整FB。
119章
第119/141页**附录B 1。**供应商声明 供应商名称供应商地址市国家电话传真电子邮件地址产品名称产品版本发布日期我在此声明,填写并提交的以下表格与我们的产品以及随附的表格均相符用户手册,如上所述。代表姓名(人):签名日期(年/月/日):签名:
第120部分
第120/141页附录B 2。支持的数据类型使用MC库定义的数据类型:支持的如果不支持,则使用哪种数据类型 BOOLINT|WORD|REAL枚举联合会表6:支持的数据类型在规范中,定义了以下派生数据类型。定义在此使用哪些结构系统:** 派生数据类型:在哪里使用支持的****哪个结构** AXIS_REF几乎所有FBMC_DIRECTION(扩展)MC_MoveAbsoluteMC_MoveVelocityMC_TorqueControlMC_MoveContinuousAbsoluteMC_TP_REFMC_PositionProfileMC_TV_REFMC_VelocityProfileMC_TA_REFMC_AccelerationProfileMC_CAM_REFMC_CamTableSelectMC_CAM_ID(扩展)MC_CamTableSelectMC_CamInMC_START_MODE(扩展)MC_CamInMC_CamTableSelectMC_BUFFER_MODE缓冲FBMC_EXECUTION_MODEMC_SetPositionMC_WriteParameterMC_WriteBoolParameterMC_WriteDigitalOutputMC_CamTableSelectMC_SOURCEMC_ReadMotionStateMC_CamInMC_GearInMC_GearInPosMC_CombineAxesMC_DigitalCamSwitchMC_SYNC_MODEMC_GearInPosMC_COMBINE_MODEMC_CombineAxesMC_TRIGGER_REFMC_TouchProbeMC_AbortTriggerMC_INPUT_REFMC_ReadDigitalInputMC_OUTPUT_REFMC_DigitalCamSwitchMC_ReadDigitalOutputMC_WriteDigitalOutputMC_CAMSWITCH_REFMC_DigitalCamSwitchMC_TRACK_REFMC_DigitalCamSwitch** 表7:支持的派生数据类型**
第121页
第121/141页附录B 3。功能块概述单轴功能块支持为V1.0 / V1.1 /是否为V2.0评论(<= 48个|WORD|符。) MC_PowerMC_HomeMC_StopMC_HaltMC_MoveAbsoluteMC_MoveRelativeMC_MoveAdditiveMC_MoveSuperimposedMC_HaltSuperimposedMC_MoveVelocityMC_MoveContinuousAbsoluteMC_MoveContinuousRelativeMC_TorqueControlMC_PositionProfileMC_VelocityProfileMC_AccelerationProfileMC_SetPositionMC_SetOverrideMC_ReadParameter&MC_ReadBoolParameterMC_WriteParameter&MC_WriteBoolParameterMC_ReadDigitalInputMC_ReadDigitalOutputMC_WriteDigitalOutputMC_ReadActualPositionMC_ReadActualVelocityMC_ReadActualTorqueMC_ReadStatusMC_ReadMotionStateMC_ReadAxisInfoMC_ReadAxisErrorMC_ResetMC_DigitalCamSwitchMC_TouchProbeMC_AbortTrigger** 多轴功能块支持为V1.0 / V1.1 /是否为V2.0评论(<= 48个|WORD|符。)** MC_CamTableSelectMC_CamInMC_CamOutMC_GearInMC_GearOutMC_GearInPosMC_PhasingAbsoluteMC_PhasingRelativeMC_CombineAxes** 表8:功能块的简要概述**
第122页
第122/141页附录B 3.1 MC_Power如果支持MC_Powerup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用E启用正EEnableNegativeVAR_OUTPUTB状态E有效BErrorEErrorID附录B 3.2 MC_Home如果支持MC_Homeup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行B位置EBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorID附录B 3.3 MC_Stop 如果支持MC_Stopup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E减速EJerkVAR_OUTPUTBDoneEBusyECommandAbortedBErrorEErrorID
第123页
第123/141页附录B 3.4 MC_Halt如果支持MC_Haltup 是/否VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E减速EJerkEBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorID附录B 3.5 MC_MoveAbsolute如果支持MC_MoveAbsolute年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新B位置B速度E加速E减速EJerkB方向EBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorID
第124页
第124/141页附录B 3.6 MC_MoveRelative如果支持MC_MoveRelativeup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新B距离E速度E加速E减速EJerkEBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorID** 附录B 3.7 MC_MoveAdditive如果支持MC_MoveAdditive**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新B距离E速度E加速E减速EJerkEBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorID
第125页
第125/141页附录B 3.8 MC_MoveSuperimposed如果支持MC_MoveSuperimposedup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新B距离E速度差异E加速E减速EJerkVAR_OUTPUTBDoneEBusyECommandAbortedBErrorEErrorIDE覆盖距离附录B 3.9 MC_HaltSuperimposed如果支持MC_HaltSuperimposedup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E减速EJerkVAR_OUTPUTBDoneEBusyECommandAbortedBErrorEErrorID
第126页
第126/141页附录B 3.10 MC_MoveVelocity如果支持MC_MoveVelocityup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新E速度E加速E减速EJerkE方向EBufferModeVAR_OUTPUTB速度EBusyEActiveECommandAbortedBErrorEErrorID** 附录B 3.11 MC_MoveContinuousAbsolute如果支持MC_MoveContinuousAbsolute** Sup。是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新B位置B终结速度B速度E加速E减速EJerkE方向EBufferModeVAR_OUTPUTB内在速度EBusyEActiveECommandAbortedBErrorEErrorID
第127页
第127/141页附录B 3.12 MC_MoveContinuousRelative如果支持MC_MoveContinuousRelativeup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新B距离B终结速度B速度E加速E减速EJerkEBufferModeVAR_OUTPUTB内在速度EBusyEActiveECommandAbortedBErrorEErrorID** 附录B 3.13 MC_TorqueControl如果支持MC_TorqueControl**年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行E持续更新B扭力E扭矩斜坡E速度E加速E减速EJerkE方向EBufferModeVAR_OUTPUTB扭力EBusyEActiveECommandAbortedBErrorEErrorID
第128节
第128/141页附录B 3.14 MC_PositionProfile如果支持MC_PositionProfileup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴B时间位置VAR_INPUTB执行E持续更新E时标E职位规模E抵消EBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorID** 附录B 3.15 MC_VelocityProfile如果支持MC_VelocityProfile**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴B时间速度VAR_INPUTB执行E持续更新E时标E速度刻度E抵消EBufferModeVAR_OUTPUTB个人资料已完成EBusyEActiveECommandAbortedBErrorEErrorID
第129章一更
第129 /页141附录B 3.16 MC_AccelerationProfile如果支持MC_AccelerationProfileup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴B时间加速VAR_INPUTB执行E持续更新E时标E加速度比例E抵消EBufferModeVAR_OUTPUTB个人资料已完成EBusyEActiveECommandAbortedBErrorEErrorID** 附录B 3.17 MC_SetPosition如果支持MC_SetPosition年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行B位置E相对的E执行模式VAR_OUTPUTBDoneEBusyBErrorEErrorID附录B 3.18 MC_SetOverride如果支持 MC_SetOverride**年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用BVelFactorEAccFactorEJerk因素VAR_OUTPUTB已启用EBusyBErrorEErrorID
第130章
第130/141页附录B 3.19 MC_ReadParameter和MC_ReadBoolParameter如果支持MC_ReadParameterup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用B参数编号VAR_OUTPUTB有效EBusyBErrorEErrorIDB值如果支持** MC_ReadBoolParameterup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用B参数编号VAR_OUTPUTB有效EBusyBErrorEErrorIDB值名称是读/写补给是/否****评论** 指令位置B[ RSWLimitPosE读/写SWLimitNegE读/写EnableLimitPosE读/写EnableLimitNegE读/写EnablePosLagMonitoringE读/写最大位置滞后E读/写最大速度系统E[ RMaxVelocityApplB读/写实际速度B[R指令速度B[R最大加速系统E[RMaxAccelerationApplE读/写最大减速系统E[ RMaxDecelerationApplE读/写MaxJerk系统E[R马克·杰克·阿普尔E读/写** 表9:MC_Read(Bool)Parameter和MC_Write(Bool)Parameter的参数**
聪明的一休第131集
第131/141页附录B 3.20 MC_WriteParameter和MC_WriteBoolParameter如果支持MC_WriteParameterup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行B参数编号B值E执行模式VAR_OUTPUTBDoneEBusyBErrorEErrorID如果支持MC_WriteBoolParameterup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行B参数编号B值E执行模式VAR_OUTPUTBDoneEBusyBErrorEErrorID附录B 3.21 MC_ReadDigitalInput如果支持** MC_ReadDigitalInput**年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B输入值VAR_INPUTB启用E输入编号VAR_OUTPUTB有效EBusyBErrorEErrorIDB值
第132页
第132/141页附录B 3.22 MC_ReadDigitalOutput如果支持MC_ReadDigitalOutput年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B输出量VAR_INPUTB启用E输出编号VAR_OUTPUTB有效EBusyBErrorEErrorIDB值附录B 3.23 MC_WriteDigitalOutput如果支持MC_WriteDigitalOutput年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B输出量VAR_INPUTB执行E输出编号B值E执行模式VAR_OUTPUTBDoneEBusyBErrorEErrorID附录B 3.24 MC_ReadActualPosition 如果支持MC_ReadActualPositionup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用VAR_OUTPUTB有效EBusyBErrorEErrorIDB位置
第133页
第133/141页附录B 3.25 MC_ReadActualVelocity如果支持MC_ReadActualVelocity年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用VAR_OUTPUTB有效EBusyBErrorEErrorIDB速度附录B 3.26 MC_ReadActualTorque 如果支持MC_ReadActualTorque年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用VAR_OUTPUTB有效EBusyBErrorEErrorIDB扭力附录B 3.27 MC_ReadStatus如果支持MC_ReadStatusup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用VAR_OUTPUTB有效EBusyBErrorEErrorIDBError停止B残障人士B正在停止E归位B停顿E离散运动E连续运动E同步运动
第134页
第134/141页附录B 3.28 MC_ReadMotionState如果支持MC_ReadMotionStateup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用E资源VAR_OUTPUTB有效EBusyBErrorEErrorIDE恒定速度E加速中E减速中E正向E负方向附录B 3.29 MC_ReadAxisInfo如果支持MC_ReadAxisInfoup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用VAR_OUTPUTB有效EBusyBErrorEErrorIDEHomeAbsSwitchE限位开关E限位开关负E模拟E通讯就绪E准备开机E打开E归乡E轴警告** 附录B 3.30 MC_ReadAxisError如果支持MC_ReadAxisError**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB启用VAR_OUTPUTB有效EBusyBErrorBErrorIDEAxisErrorID
135章
第135/141页附录B 3.31 MC_Reset如果支持MC_Resetup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴VAR_INPUTB执行VAR_OUTPUTBDoneEBusyBErrorEErrorID附录B 3.32 MC_DigitalCamSwitch如果支持MC_DigitalCamSwitch 年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴B开关E产出ETrackOptionsVAR_INPUTB启用EEnableMaskE价值来源VAR_OUTPUTB运行中EBusyBErrorEErrorIDMC_CAMSWITCH_REF数组结构中的基本元素** 是参数年/年评论B追踪号码BFirstOnPosition [u]BLastOnPosition [u] E轴方向E凸轮开关模式E持续时间MC_TRACK_REF数组结构中的基本元素是参数**年/年评论E补偿E补偿外E磁滞[u]
136章
第136/141页附录B 3.33 MC_TouchProbe如果支持MC_TouchProbe年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴E触发输入VAR_INPUTB执行E仅窗口E第一位置E最后位置VAR_OUTPUTBDoneEBusyECommandAbortedBErrorEErrorIDB记录位置** 附录B 3.34 MC_AbortTrigger如果支持MC_AbortTrigger年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B轴E触发输入VAR_INPUTB执行VAR_OUTPUTBDoneEBusyBErrorEErrorID附录B 3.35 MC_CamTableSelect如果支持 MC_CamTableSelect**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |E主E奴隶B凸轮表VAR_INPUTB执行E定期的E绝对大师E绝对奴隶E执行模式VAR_OUTPUTBDoneEBusyBErrorEErrorIDECamTableID
137章
第137/141页附录B 3.36 MC_CamIn如果支持MC_CamInup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B主B奴隶VAR_INPUTB执行E持续更新EMasterOffsetE从站偏移EMasterScalingE从比例缩放EMasterStartDistanceEMasterSyncPositionE启动模式EMasterValueSourceECamTableIDEBufferModeVAR_OUTPUTB同步中EBusyEActiveECommandAbortedBErrorEErrorIDEEndOfProfile** 附录B 3.37 MC_CamOut如果支持MC_CamOut**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B奴隶VAR_INPUTB执行VAR_OUTPUTBDoneEBusyBErrorEErrorID
第138页
第138/141页附录B 3.38 MC_GearIn如果支持MC_GearInup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- |
|B主B奴隶VAR_INPUTB执行E持续更新B比率分子B比率分母EMasterValueSourceE加速E减速EJerkEBufferModeVAR_OUTPUTB齿轮EBusyEActiveECommandAbortedBErrorEErrorID** 附录B 3.39 MC_GearOut如果支持MC_GearOut**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B奴隶VAR_INPUTB执行VAR_OUTPUTBDoneEBusyBErrorEErrorID
139章
第139/141页附录B 3.40 MC_GearInPos如果支持MC_GearInPos年/年评论VAR_IN_OUT | | | | | | ---- | ---- | -------- |
|B主B奴隶VAR_INPUTB执行B比率分子B比率分母EMasterValueSourceBMasterSyncPositionBSlaveSyncPositionE同步模式EMasterStartDistanceE速度E加速E减速EJerkEBufferModeVAR_OUTPUTEStartSyncB同步中EBusyEActiveECommandAbortedBErrorEErrorID** 附录B 3.41 MC_PhasingAbsolute如果支持MC_PhasingAbsolute**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B主B奴隶VAR_INPUTB执行B相移E速度E加速E减速EJerkEBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorIDE绝对相移
第140章一更
第140/141页附录B 3.42 MC_PhasingRelative如果支持MC_PhasingRelativeup 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B主B奴隶VAR_INPUTB执行B相移E速度E加速E减速EJerkEBufferModeVAR_OUTPUTBDoneEBusyEActiveECommandAbortedBErrorEErrorIDECoveredPhaseShift** 附录B 3.43 CombineAxes如果支持MC_CombineAxes**up 是/否评论VAR_IN_OUT | | | | | | ---- | ---- | -------- | ------ |B硕士1B硕士2B奴隶VAR_INPUTB执行E持续更新E组合模式EGearRationNumeratorM1E齿轮比分母M1EGearRatioNumeratorM2EGearRatioDenominatorM2EMasterValueSourceM1EMasterValueSourceM2EBufferModeVAR_OUTPUTB同步中EBusyEActiveECommandAbortedBErrorEErrorID
第141页
第141/141页附录B 4。****PLCopen运动控制徽标及其用法为了快速识别兼容产品,PLCopen开发了运动控制功能块的徽标:** 图64:PLCopen运动控制徽标**该运动控制徽标由PLCopen拥有并拥有商标。为了免费使用此徽标,相关公司必须满足以下所有要求:1.公司必须是PLCopen的有投票权的成员;2.公司必须遵守PLCopen 工作组 Motion规定的现有规范控制,由PLCopen发布,该语句是其中的一部分;3.该合规性申请由公司以书面形式提供给PLCopen,明确说明了该申请-电缆软件包和所有指定表格的支撑元件,如文档中所指定的那样-自;4.如果无法履行(必须由PLCopen决定),公司将收到书面声明有关PLCopen的问题。该公司将有一个月的时间来采用其软件包-以发布新的合规声明为代表的合规方式,或删除所有引用规范的含义,包括徽标的使用,无论是技术规范还是促销规范,传统资料;5.徽标必须原样使用-表示完整徽标。可以更改大小,以提供原始比例和保留颜色设置。6.徽标必须在运动控制的上下文中使用。
[[ParameterNumber]]